2020/05/11
StopWatch コンポーネントを不要にしました。
2020/02/01
StopWatch コンポーネントをダウンロード出来るようにしました。
Delphi標準のStopWatchでは、時間が短すぎて、測定が出来ないのでWtopWatchコンポーネントを追加しています。
>ヤコビの楕円関数の検討
縄跳びの紐の形が、ヤコビの楕円関数で現されるので、これについて、プログラムを検討してみました。
最初は、第一種楕円積分の逆関数なので、第一種楕円積分を利用して、sn(u,k)の計算プログラムを作成してみましたが、あまりにも時間がかかるので、色々探して、テストをしてみました。
第一種楕円積分の計算をそのまま利用したものは、計算の結果に間違いがないので、検算用に利用しています。
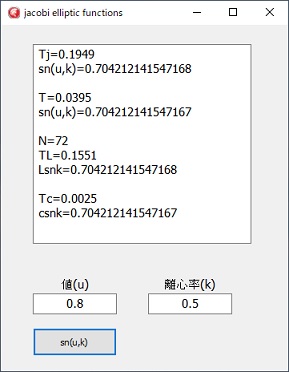 T=は、実行時間です、単位は秒です。
T=は、実行時間です、単位は秒です。
一番上は、カールソンの第一種楕円積分を利用して、逆算をしたものです。
二番目は、Wikipediaに有ったランベルト級数による計算。
三番目は、ランデン変換による第一種楕円積分による逆算です。
四番目はMathematics Source Library C & ASMにあったヤコビの楕円関数をDelphi用に変換したものです。
計算時間は、圧倒的に四番目のelliptic amplitude function、Gaussian transformationsを使用した計算が速くなっています。
プログラムも簡単です。
二番目のランベルト級数による計算は、離心率の値が0.0001と小さくなると、計算の誤差が大きくなりますが実用上は問題ないと思われます。
計算の精度は、Doubleとしました。
テストプログラム
//-----------------------------------------------------
// ヤコビの楕円関数
//-----------------------------------------------------
unit Main;
interface
uses
Winapi.Windows, Winapi.Messages, System.SysUtils, System.Variants, System.Classes, Vcl.Graphics,
Vcl.Controls, Vcl.Forms, Vcl.Dialogs, Vcl.StdCtrls, Vcl.ExtCtrls, VclTee.TeeGDIPlus,
VCLTee.TeEngine, VCLTee.Series, VCLTee.TeeProcs, VCLTee.Chart, StopWatch;
type
TForm1 = class(TForm)
Memo1: TMemo;
snukbtn: TButton;
u_Edit: TLabeledEdit;
K_Edit: TLabeledEdit;
StopWatch1: TStopWatch;
procedure snukbtnClick(Sender: TObject);
private
FFrequency: int64; // ストップウォッチ用 基準クロック
FStart: int64; // スタートカウンター値
FStop: int64; // ストップカウンター値
{ Private 宣言 }
function RF(x1, y1, z1: double): double;
function calc_first_elliptic_integral(k, sinQ: double): double;
function jacobi_sn(u, k: double): double;
function KKd_jacobi_sn(u, k: double): double;
function first_imperfect_elliptic_integral(Q, K: double): double;
function Lanjacobi_sn(u, k: double): double;
function Lcalc_first_elliptic_integral(k, sinQ: double): double;
procedure Start; // stopwatch strat
function Stop: extended; // stopwatch stop
public
{ Public 宣言 }
end;
var
Form1: TForm1;
implementation
{$R *.dfm}
uses Math;
// ストップウォッチスタート
procedure TForm1.Start;
begin
QueryPerformanceFrequency(FFrequency); // 基準クロック取得
QueryPerformanceCounter(FStart); // スタート時カウンター値
end;
// ストップウォッチ停止
function TForm1.Stop: extended;
begin
QueryPerformanceCounter(FStop); // ストップ時カウンター時
if FFrequency > 0 then // クロックの値を取得出来ていたら時間計算
result := (FStop - FStart) * 1000 / FFrequency
else result := -1;
end;
//-------------------------------
// 第1種不完全積分
// FBnKn[0] 第1種不完全積分解
// ランデン変換
// Q 角度 rad
// K 離心率
//-------------------------------
function TForm1.first_imperfect_elliptic_integral(Q, K: double): double;
var
I, MI : integer;
Kn : array of double; // Kn
knd : array of double; // k'n
N2SKn : array of double; // 2/(1+Kn)
T2SKnd : array of double; // П2/(1+Kn')
BRad : array of double; // β(rad)
SinBn : array of double; // sinβn
FBnKn : array of double; // F(βn,kn)
LnD : double;
begin
// K = 0 の時は円なのでpiの角度値rad。
if K = 0 then begin
result := Q;
exit;
end;
// この時は1をかえします。
if (K = 1) and (Q = pi / 2) then begin
result := 1;
exit;
end;
// 1 >= K > 0 の時
MI := 0;
LnD := 0;
setlength(kn, MI + 1); // kn
kn[0] := K;
while LnD <> Kn[MI] do begin // LnDとkn[]が同じ1になるまでくり返します
LnD := Kn[MI];
inc(MI);
setlength(kn, MI + 1); // kn
kn[MI] := 2 * sqrt(Kn[MI - 1])/(1 + Kn[MI - 1]);
end;
setlength(kn, MI); // kn
setlength(knd, MI); // k'n
setlength(N2SKn, MI); // 2/(1+Kn)
setlength(T2SKnd, MI); // П2/(1+Kn')
setlength(BRad, MI); // β(rad)
setlength(SinBn, MI); // sinβn
setlength(FBnKn, MI); // F(βn,kn)
dec(MI);
knd[0] := 1;
for I := 1 to MI do
knd[I] := (1 - kn[I - 1]) / (1 + Kn[I - 1]);
for I := 0 to MI do
N2SKn[I] := 2 / (1 + kn[I]);
T2SKnd[MI] := N2SKn[MI];
for I := MI - 1 downto 0 do
T2SKnd[I] := T2SKnd[I + 1] * N2SKn[I];
BRad[0] := Q;
for I := 1 to MI do
BRad[I] := (arcsin(kn[I - 1] * sin(Brad[I - 1])) + Brad[I - 1]) / 2;
for I := 0 to MI do
SinBn[I] := sin(Brad[I]);
result := (1 + sin(Brad[MI])) / cos(Brad[MI]);
if result <= 0 then exit; // 0以下は自然対数の計算出来ません
LnD := LN(result);
result := T2SKnd[0] * LnD; // 第一種
end;
// 第一種楕円積分 ルーチン
// 積分範囲制限なし sin(π/2) = 1 単位積分
function TForm1.Lcalc_first_elliptic_integral(k, sinQ: double): double;
var
J : integer;
k2 : double;
fqk : double;
f1k : double;
fek : double;
asin : double;
begin
asin := abs(sinQ);
k2 := k * k; // k^2
if (k2 >= 1) and (asin >= 1) then begin // 積分出来ない値だったら
if sinQ > 0 then result := MaxDouble // double最大値セット∞の代わり
else result := -MaxDouble; // double最小値セット-∞の代わり
exit; // 終了
end;
f1k := 0; // 完全積分値初期化
J := trunc(asin); // 整数部取り出し
if J mod 2 = 0 then asin := asin - J // 小数部処理 象限処理
else asin := 1 - (asin - J);
if (J <> 0) and (k2 < 1) then f1k := first_imperfect_elliptic_integral(pi / 2, k); // 第一種完全積分
fek := first_imperfect_elliptic_integral(arcsin(asin), k); // 第一種不完全積分
if j mod 2 = 0 then
fqk := j * f1k + fek // 第1,第3象限の積分値
else
fqk := (j + 1) * f1k - fek; // 第2,第4象限の積分値
if sinQ < 0 then fqk := -fqk; // 積分範囲の符号で積分値の符号設定
result := fqk;
end;
// ヤコビの楕円関数 sn(u, k) ランデン変換第一種楕円積分による逆計算
function TForm1.Lanjacobi_sn(u, k: double): double;
const
Keps = 1E-15;
KN = 1000;
var
eps : double;
sinQ : double;
ud, dsin : double;
i : integer;
absu : double;
N : integer;
t : double;
begin
Start;
eps := Keps;
absu := abs(u); // uの絶対値
dsin := 0.5; // 初期補正角度設定
sinQ := 0.5; // 初期値設定
for i := 0 to KN do begin
ud := Lcalc_first_elliptic_integral(k, sinQ);
if ud > absu then begin // 積分値が指定値より大きかったら
sinQ := sinQ - dsin; // 補正値減算
dsin := dsin / 2; // 補正値2分の1に
end;
sinQ := sinQ + dsin; // 補正値加算
if dsin < eps then break; // 角度補正値が収束判定値より小さくなったら終了
end;
N := i;
i := trunc(sinQ);
if i mod 2 = 0 then // sin(90°)単位をsin(180°)単位に変換
sinQ := (sinQ - i) // 奇数象限と偶数象限計算
else
sinQ := 1 - (sinQ - i);
i := i div 2; // sin(180°)単位をsin(360°)に変換
if i mod 2 <> 0 then sinQ := -sinQ; // sinは180°毎に符号が反転
if u < 0 then sinQ := -sinQ; // 範囲の符号で逆変換値の符号設定
result := sinQ;
t := Stop;
Memo1.Lines.Add('N=' + intTostr(N));
memo1.Lines.Add('TL=' + floatTostr(t));
end;
// Carlson's Elliptic Integral RF
function TForm1.RF(x1, y1, z1: double): double;
var
la, mu : double;
x2, y2, z2 : double;
x3, y3, z3 : double;
s2, s3 : double;
r0, rf : double;
s22, s23, s2s3, s32 : double;
begin
rf := 0;
repeat
r0 := rf;
la := sqrt(x1 * Y1) + sqrt(x1 * z1) + sqrt(y1 * z1);
mu := (x1 + y1 + z1) / 3;
x2 := (x1 + la) / 4;
y2 := (y1 + la) / 4;
z2 := (z1 + la) / 4;
x3 := 1 - x2 / mu;
y3 := 1 - y2 / mu;
z3 := 1 - z2 / mu;
s2 := (x3 * x3 + y3 * y3 + z3 * z3) / 4;
s3 := (x3 * x3 * x3 + y3 * y3 * y3 + z3 * z3 * z3) / 6;
s22 := s2 * s2 / 6;
s23 := 5 * s2 * s2 * s2 / 26;
s32 := 3 * s3 * s3 / 26;
s2s3 := s2 * s3 * 3 / 11;
rf := (1 + s2 / 5 + s3 / 7 + s22 + s2s3 + s23 + s32) / sqrt(mu);
x1 := x2;
y1 := y2;
z1 := z2;
until rf = r0;
result := rf;
end;
// 第一種楕円積分 ルーチン
// 積分範囲制限なし sin(π/2) = 1 単位積分
function TForm1.calc_first_elliptic_integral(k, sinQ: double): double;
var
J : integer;
s2 : double;
c2 : double;
rf0 : double;
k2 : double;
fqk : double;
f1k : double;
fek : double;
asin : double;
begin
asin := abs(sinQ);
k2 := k * k; // k^2
if (k2 >= 1) and (asin >= 1) then begin // 積分出来ない値だったら
if sinQ > 0 then result := MaxDouble // double最大値セット∞の代わり
else result := -MaxDouble; // double最小値セット-∞の代わり
exit; // 終了
end;
f1k := 0; // 完全積分値初期化
J := trunc(asin); // 整数部取り出し
if J mod 2 = 0 then asin := asin - J // 小数部処理 象限処理
else asin := 1 - (asin - J);
if (J <> 0) and (k2 < 1) then f1k := RF(0, 1 - k2, 1); // 第一種完全積分
s2 := asin * asin; // sin~2(φ)
c2 := 1 - s2; // cos^2(φ')
rf0 := RF(c2, 1 - k2 * s2, 1);
fek := asin * rf0; // F(φ',K) = rf0 * sin(φ') 第一種不完全積分
if j mod 2 = 0 then
fqk := j * f1k + fek // 第1,第3象限の積分値
else
fqk := (j + 1) * f1k - fek; // 第2,第4象限の積分値
if sinQ < 0 then fqk := -fqk; // 積分範囲の符号で積分値の符号設定
result := fqk;
end;
// ヤコビの楕円関数 sn(u, k) 第一種楕円積分による逆計算
function TForm1.jacobi_sn(u, k: double): double;
const
Keps = 1E-15;
KN = 1000;
var
eps : double;
sinQ : double;
ud, dsin : double;
i : integer;
absu : double;
N : integer;
t : double;
begin
Start;
eps := Keps;
absu := abs(u); // uの絶対値
dsin := 0.5; // 初期補正角度設定
sinQ := 0.5; // 初期値設定
for i := 0 to KN do begin
ud := calc_first_elliptic_integral(k, sinQ); // 第一種楕円積分
if ud > absu then begin // 積分値が指定値より大きかったら
sinQ := sinQ - dsin; // 補正値減算
dsin := dsin / 2; // 補正値2分の1に
end;
sinQ := sinQ + dsin; // 補正値加算
if dsin < eps then break; // 角度補正値が収束判定値より小さくなったら終了
end;
N := i;
i := trunc(sinQ);
if i mod 2 = 0 then // sin(90°)単位をsin(180°)単位に変換
sinQ := (sinQ - i) // 奇数象限と偶数象限計算
else
sinQ := 1 - (sinQ - i);
i := i div 2; // sin(180°)単位をsin(360°)に変換
if i mod 2 <> 0 then sinQ := -sinQ; // sinは180°毎に符号が反転
if u < 0 then sinQ := -sinQ; // 範囲の符号で逆変換値の符号設定
result := sinQ;
t := Stop;
Memo1.Lines.Add('N=' + intTostr(N));
memo1.Lines.Add('Tj=' + floatTostr(t));
end;
// ヤコビ楕円関数 ランベルト級数
function TForm1.KKd_jacobi_sn(u, k: double): double;
const
KN = 100;
var
Kl, Kld : double;
q, v, kd : double;
siguma : double;
n : integer;
half : double;
n2p1 : integer;
t : double;
begin
Start;
kd := sqrt(1 - k * k);
Kl := calc_first_elliptic_integral(k, 1);
Kld := calc_first_elliptic_integral(kd, 1);
siguma := 0;
q := exp(-pi * Kld / Kl);
v := pi * u / (2 * Kl);
half := 1 / 2;
for n := 0 to KN do begin
n2p1 := n + n + 1;
siguma := siguma + power(q, n + half) / (1 - power(q, n2p1)) * sin(n2p1 * v);
end;
if k > 1E-5 then
result := 2 * pi / Kl / K * siguma
else
result := sin(u); // kの値が小さくなると誤差が大きくなるので単にsinで計算
t := Stop;
// memo1.Lines.Add('K =' + floatTostr(KL));
// memo1.Lines.Add('K''=' + floatTostr(KLd));
memo1.Lines.Add('T=' + floatTostr(t));
end;
// 振幅関数
function Jacobi_am(u: double; arg: char; x: double): double;
const
KN = 30;
EPSILON = 1E-15;
var
a: array of double;
g: array of double;
c: array of double;
two_n : double;
phi : double;
k : double;
i, j, N : integer;
half : double;
begin
if x = 0 then begin
result := u;
exit;
end;
case arg of
'a' : k := sin(abs(x));
'm' : k := sqrt(abs(x));
else k := abs(x);
end;
if k = 1 then begin
result := 2 * arctan(exp(u)) - pi / 2;
exit;
end;
N := 1;
setlength(a, N);
setlength(g, N);
setlength(c, N);
a[0] := 1;
g[0] := sqrt(1 - k * k);
c[0] := k;
two_n := 1;
half := 1 / 2;
for i := 0 to KN do begin
if abs(a[i] - g[i]) < a[i] * EPSILON then break;
two_n := two_n + two_n;
inc(N);
setlength(a, N);
setlength(g, N);
setlength(c, N);
a[i + 1] := half * (a[i] + g[i]);
g[i + 1] := sqrt(a[i] * g[i]);
c[i + 1] := half * (a[i] - g[i]);
end;
phi := two_n * a[i] * u;
for j := i downto 1 do
phi := half * (phi + arcsin(c[j] * sin(phi) / a[j]));
result := phi;
end;
// ヤコビ楕円関数
function c_jacobi_sn(u: double; arg: char; x: double):double;
var
t : double;
begin
Form1.Start;
result := sin(Jacobi_am(u, arg, x));
t := Form1.Stop;
Form1.Memo1.Lines.Add('Tc=' + floatTostr(t));
end;
// sn(u,k)計算
procedure TForm1.snukbtnClick(Sender: TObject);
var
k, u, snuk : double;
KKd_snuk : double;
Lsnuk : double;
csnu : double;
ch : integer;
begin
val(k_edit.Text, k, ch);
if ch <> 0 then begin
application.MessageBox('離心率(k)に間違いがあります。','注意',0);
exit;
end;
if K > 1 then begin
application.MessageBox('離心率(k)は1以下にして下さい。','注意',0);
exit;
end;
val(u_edit.Text, u, ch);
if ch <> 0 then begin
application.MessageBox('値(u)に間違いがあります。','注意',0);
exit;
end;
memo1.Clear;
snuk := jacobi_sn(u, k);
memo1.Lines.Add('sn(u,k)=' + floatTostr(snuk));
memo1.Lines.Add('');
if K < 1 then begin
KKd_snuk := KKd_jacobi_sn(u, k);
memo1.Lines.Add('sn(u,k)=' + floatTostr(KKD_snuk));
end
else
memo1.Lines.Add('KKd_jacobi_sn K=1 不可');
memo1.Lines.Add('');
Lsnuk := Lanjacobi_sn(u, k);
memo1.Lines.Add('Lsnk=' + floatTostr(Lsnuk));
memo1.Lines.Add('');
csnu := c_jacobi_sn(u, 'K', k);
memo1.Lines.Add('csnk=' + floatTostr(csnu));
end;
end.
 jacobi_elliptic_KKd_function.zip
jacobi_elliptic_KKd_function.zip
各種プログラム計算例に戻る
最初に戻る