縄跳び紐の張力計算
 ヤコビの楕円関数の計算に縄跳び紐の計算が有ります。
ヤコビの楕円関数の計算に縄跳び紐の計算が有ります。
縄跳び紐の回転時の形状は、ヤコビの楕円関数snの計算を使用します。
此処では、縄跳び紐の張力の計算をします。
張力の計算には、第一種楕円積分を利用する方法と、二次方程式を利用する方法が有ったので、両方の計算をしてみました。
二次方程式を利用する方法でも、cの値の計算に第一種楕円積分を使用しているので、両方とも第一種楕円積分を利用していることは変わりません。
紐の張力は水平方向の張力を計算して、紐端点の紐の角度により、紐の端点の張力を求めます。
実際には、重力加速度の影響があるのですが、計算に入っていません。
紐を廻す為には、端点も小さな回転をしているし、空気の抵抗があるので、厳密な計算は難しく、ここでは全て無視をして向心力だけの計算をしています。
紐の長さ計算には、第一種楕円積分と第二種楕円積分を利用します。
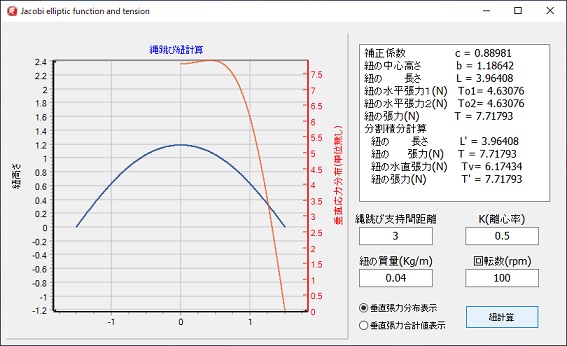 左図は、X方向を分割計算して、垂直張力の分布を表示しています。
左図は、X方向を分割計算して、垂直張力の分布を表示しています。
分割計算の場合、垂直方向の値を求めるのが容易だからです。
中央部分が少し凹んでいるのは、X方向に対して、紐が水平に近くなるため、傾斜のある部分より、紐の長さが短くなる為です。
張力のグラフは、分割計算により表示しています。
表示方法を変更することにより、中央からの合計値の表示も可能です。
紐の水平張力1は、第一種楕円積分による張力計算、紐の水平張力2は、第一種楕円積分と二次方程式利用による張力計算です。
プログラム
//-----------------------------------------------------
// ヤコビの楕円関数と縄跳びの紐計算
// http://fuchino.ddo.jp/yatsugatake/ellipticx.pdf
//-----------------------------------------------------
unit Main;
interface
uses
Winapi.Windows, Winapi.Messages, System.SysUtils, System.Variants, System.Classes, Vcl.Graphics,
Vcl.Controls, Vcl.Forms, Vcl.Dialogs, Vcl.StdCtrls, Vcl.ExtCtrls, VclTee.TeeGDIPlus,
VCLTee.TeEngine, VCLTee.Series, VCLTee.TeeProcs, VCLTee.Chart;
type
TForm1 = class(TForm)
LabeledEdit10: TLabeledEdit;
LabeledEdit11: TLabeledEdit;
Memo1: TMemo;
nawaBtn: TButton;
Chart1: TChart;
Series1: TLineSeries;
Series2: TPointSeries;
massEdit: TLabeledEdit;
rotational_speed_Edit: TLabeledEdit;
Series3: TLineSeries;
RadioButton1: TRadioButton;
RadioButton2: TRadioButton;
procedure nawaBtnClick(Sender: TObject);
private
{ Private 宣言 }
function RJ(x1, y1, z1, p1: double): double;
function RF(x1, y1, z1: double): double;
function calc_first_elliptic_integral(k, dpi: double; var ALFRG : byte): double;
function calc_second_elliptic_integral(k, dpi: double): double;
function jacobi_sn(u, k: double): double;
function Jacobi_am(u, k: double): double;
procedure tension(a, k, b, c: double);
public
{ Public 宣言 }
end;
var
Form1: TForm1;
implementation
{$R *.dfm}
uses Math;
// Carlson's Elliptic Integral RJ
function TForm1.RJ(x1, y1, z1, p1: double): double;
var
s, fa, rj, rk : double;
la, mu : double;
al, be : double;
r1, a1, b1 : double;
a2, b2, mv, s1 : double;
rc, r0 : double;
s12, s13, s14 : double;
s15, s16 : double;
x2, y2, z2 : double;
x3, y3, z3 : double;
s2, s3, p2, p3 : double;
s4, s5 : double;
x31, y31, z31, p31 : double;
s22, s23, s2s3 : double;
procedure rcab;
begin
rc := 1;
a1 := al;
b1 := be;
repeat
r1 := rc;
la := 2 * sqrt(a1 * b1) + b1;
a2 := (a1 + la) / 4;
b2 := (b1 + la) / 4;
mv := (a1 + 2 * b1) / 3;
s1 := (b1 - a1) / (3 * mv);
s12 := s1 * s1;
s13 := s12 * s1;
s14 := s13 * s1;
s15 := s14 * s1;
s16 := s15 * s1;
rc := (1 + 3 * s12 / 10 + s13 / 7 + 3 * s14 / 8 + 9 * s15 / 22 + 159 * s16 / 208) / sqrt(mv);
a1 := a2;
b1 := b2;
until r1 = rc;
end;
function ss: double;
begin
x31 := x31 * x3;
y31 := y31 * y3;
z31 := z31 * z3;
p31 := p31 * p3;
result := (x31 + y31 + z31 + p31);
end;
begin
s := 0;
fa := 3;
rj := 0;
repeat
r0 := rj;
la := sqrt(x1 * y1) + sqrt(x1 * z1) + sqrt(y1 * z1);
mu := (x1 + y1 + z1 + 2 * p1) / 5;
x2 := (x1 + la) / 4;
y2 := (y1 + la) / 4;
z2 := (z1 + la) / 4;
p2 := (p1 + la) / 4;
x3 := 1 - x1 / mu;
y3 := 1 - y1 / mu;
z3 := 1 - z1 / mu;
p3 := 1 - p1 / mu;
x31 := x3;
y31 := y3;
z31 := z3;
p31 := 2 * p3;
s2 := ss / 4;
s3 := ss / 6;
s4 := ss / 8;
s5 := ss / 10;
al := (sqrt(x1) + sqrt(y1) + sqrt(z1)) * p1 + sqrt(x1 * y1 * z1);
al := al * al;
be := p1 * (p1 + la) * (p1 + la);
rcab;
s22 := 3 * s2 * s2 / 22;
s23 := s2 * s2 * s2 / 10;
s2s3 := s2 * s3 * 3 / 13;
s := s + fa * rc;
rk := 1 + 3 * s2 / 7 + s3 / 3 + s22 + s2s3 + 3 * s4 / 11 + 3 * s5 / 13 - s23;
fa := fa / 4;
mu := sqrt(1 / (mu * mu * mu));
rj := s + fa / 4 * (rk + 3 * s3 * s3 / 10 + 3 * s2 * s4 / 5) * mu;
x1 := x2;
y1 := y2;
z1 := z2;
p1 := p2;
until rj = r0;
result := rj;
end;
// Carlson's Elliptic Integral RF
function TForm1.RF(x1, y1, z1: double): double;
var
la, mu : double;
x2, y2, z2 : double;
x3, y3, z3 : double;
s2, s3 : double;
r0, rf : double;
s22, s23, s2s3, s32 : double;
begin
rf := 0;
repeat
r0 := rf;
la := sqrt(x1 * Y1) + sqrt(x1 * z1) + sqrt(y1 * z1);
mu := (x1 + y1 + z1) / 3;
x2 := (x1 + la) / 4;
y2 := (y1 + la) / 4;
z2 := (z1 + la) / 4;
x3 := 1 - x2 / mu;
y3 := 1 - y2 / mu;
z3 := 1 - z2 / mu;
s2 := (x3 * x3 + y3 * y3 + z3 * z3) / 4;
s3 := (x3 * x3 * x3 + y3 * y3 * y3 + z3 * z3 * z3) / 6;
s22 := s2 * s2 / 6;
s23 := 5 * s2 * s2 * s2 / 26;
s32 := 3 * s3 * s3 / 26;
s2s3 := s2 * s3 * 3 / 11;
rf := (1 + s2 / 5 + s3 / 7 + s22 + s2s3 + s23 + s32) / sqrt(mu);
x1 := x2;
y1 := y2;
z1 := z2;
until rf = r0;
result := rf;
end;
// 第一種楕円積分 ルーチン
// π/2迄
function TForm1.calc_first_elliptic_integral(k, dpi: double; var ALFRG : byte): double;
var
s, s2 : double;
c2 : double;
rf0 : double;
k2 : double;
eq : double;
fqk : double;
dpib : double;
begin
ALFRG := 0;
fqk := 0;
dpib := dpi;
dpi := abs(dpi);
s := sin(dpi); // sin(φ)
s2 := s * s; // sin~2(φ)
eq := dpi;
k2 := k * k; // k^2
if ((1 - k2 * s2) <= 0) then begin // 1-K^2*sin^2(φ) = 0 K=1 φ=π/2 なら
ALFRG := 1;
end
else begin // 1-K^2*sin^2(φ) > 0 なら
c2 := cos(eq) * cos(eq); // cos^2(φ')
s := sin(eq); // sin(φ')
s2 := s * s; // sin^2(φ')
rf0 := RF(c2, 1 - k2 * s2, 1);
fqk := s * rf0; // F(φ',K) = rf0 * sin(φ')
if dpib < 0 then fqk := - fqk; // 積分範囲の符号で積分値の符号設定
end;
result := fqk;
end;
// 第二種楕円積分 ルーチン
// プラス側のみ pi / 2 迄
function TForm1.calc_second_elliptic_integral(k, dpi: double): double;
const
KS = 1E-15;
var
s, s2, s3 : double;
c2 : double;
rf0 : double;
k2 : double;
eq : double;
rd0 : double;
eek : double;
begin
eq := dpi;
k2 := k * k; // k^2
if (eq < pi / 2) or ((1 - abs(K)) >= KS) then begin
// if (eqd < 90) or (abs(K) < 1) then begin
if (1 - abs(K)) >= KS Then begin
// if abs(K) < 1 Then begin
c2 := cos(eq) * cos(eq);
s := sin(eq);
s2 := s * s;
s3 := s2 * s;
rf0 := RF(c2, 1 - k2 * s2, 1);
rd0 := RJ(c2, 1 - k2 * s2, 1, 1);
eek := s * rf0 - k2 / 3 * s3 * rd0;
end
else eek := sin(eq);
end
else eek := 1;
result := eek;
end;
// 振幅関数 am(u, k)
function TForm1.Jacobi_am(u, k: double): double;
const
N = 30;
EPSILON = 1E-15;
var
a: array[0..N] of Extended;
g: array[0..N] of Extended;
c: array[0..N] of Extended;
two_n : Extended;
phi : Extended;
half : Extended;
i, j : integer;
begin
half := 1 / 2;
if k = 0 then begin
result := u;
exit;
end;
if k = 1 then begin
result := 2 * arctan(exp(u)) - pi / 2;
exit;
end;
a[0] := 1;
g[0] := sqrt(1 - k * k);
c[0] := k;
two_n := 1;
for i := 0 to N do begin
if abs(a[i] - g[i]) < a[i] * EPSILON then break;
two_n := two_n + two_n;
a[i + 1] := half * (a[i] + g[i]);
g[i + 1] := sqrt(a[i] * g[i]);
c[i + 1] := half * (a[i] - g[i]);
end;
phi := two_n * a[i] * u;
for j := i downto 1 do
phi := half * (phi + arcsin(c[j] * sin(phi) / a[j]));
result := phi;
end;
// ヤコビの楕円関数 sn(u, k)
function TForm1.jacobi_sn(u, k: double):double;
begin
result := sin(Jacobi_am(u, k));
end;
// 紐の張力
procedure TForm1.tension(a, k, b, c: double);
const
KN = 10000;
var
ch : integer;
p, w : double;
R, T : double;
Tv, T0, g : double;
u : double;
a0, b0, c0 : double;
i : integer;
x, y : double;
xb, yb : double;
rx, ty : double;
dx : double;
dx2 : double;
snuk : double;
lp, fp : double;
Sl, Th : double;
Ke : double;
FR : byte;
a2 : double;
begin
val(massEdit.Text, p, ch);
if ch <> 0 then begin
application.MessageBox('紐の質量に間違いがあります。','注意', 0);
exit;
end;
val(rotational_speed_Edit.Text, R, ch);
if ch <> 0 then begin
application.MessageBox('回転数に間違いがあります。','注意', 0);
exit;
end;
w := R / 60 * pi * 2; // 角速度 ω
g := p * w * w; // γ=ρ*ω^2
// 水平張力計算1
FR := 0;
a2 := a + a;
Ke := calc_first_elliptic_integral(k, pi / 2, FR); // 第一種完全積分
T0 := g * a2 * a2 / 4 / (1 - k * k) / Ke / Ke; // 水平張力
memo1.Lines.Add('紐の水平張力1(N) To1= ' + floatTostrF(T0, ffFixed, 10, 5));
// T := T0 * sqrt(b * b / c / c + 1);
// 水平張力計算2
if b <> 0 then begin
a0 := -1 / c / c;
b0 := g;
c0 := g * g * b * b / 4;
T0 := (-b0 - sqrt(b0 * b0 - 4 * a0 * c0)) / 2 / a0; // 二次方程式の解法
end
else T0 := 0;
memo1.Lines.Add('紐の水平張力2(N) To2= ' + floatTostrF(T0, ffFixed, 10, 5));
T := T0 * sqrt(b * b / c / c + 1); // T0 / cosθ
memo1.Lines.Add('紐の張力(N) T = ' + floatTostrF(T, ffFixed, 10, 5));
memo1.Lines.Add('分割積分計算');
a0 := sqrt(c * c / b / b + 1);
// b0 := sqrt(b) / c / c;
dx := a / KN;
dx2 := dx / 2;
Tv := 0;
Th := 0;
xb := a;
u := xb / c; // F(α,k)=u
// jacobi_sn ヤコビの楕円関数
snuk := jacobi_sn(u, k);
yb := snuk * b; // x位置のyの値
Sl := 0;
for i := KN downto 0 do begin
x := i * dx - dx2; // x位置
u := x / c; // F(α,k)=u
// jacobi_sn ヤコビの楕円関数
snuk := jacobi_sn(u, k);
y := snuk * b; // x位置のyの値
rx := (x - xb); // Δx
ty := (y - yb); // Δy
if i = 0 then begin
rx := 0 - xb;
ty := 0 - yb;
end;
lp := sqrt(rx * rx + ty * ty); // Δl
Sl := Sl + lp; // L
fp := lp * (y + yb) * 0.5 * g; // F 向心力= mrω^2
if Radiobutton1.Checked then
if i < KN then
Series3.AddXY(-x + a, fp * KN); // グラフに追加
Tv := Tv + fp; // 垂直張力
if y <> 0 then begin
fp := fp * a0;
Th := Th + fp;
end;
xb := x;
yb := y;
if Radiobutton2.Checked then
Series3.AddXY(-x + a, Tv); // グラフに追加
end;
Sl := Sl * 2;
memo1.Lines.Add(' 紐の 長さ L'' = ' + floatTostrF(Sl, ffFixed, 10, 5));
memo1.Lines.Add(' 紐の 張力(N) T = ' + floatTostrF(Th, ffFixed, 10, 5));
memo1.Lines.Add(' 紐の水直張力(N) Tv= ' + floatTostrF(Tv, ffFixed, 10, 5));
if b = 0 then T := 0
else T := Tv * sqrt(c * c / b / b + 1); // Tv / cos(pi/2 - θ)
// a0 := arctan(b / c);
// T := tv / cos(pi/ 2 - a0);
memo1.Lines.Add(' 紐の張力(N) T'' = ' + floatTostrF(T, ffFixed, 10, 5));
end;
// 縄跳びの縄弛み計算
procedure TForm1.nawaBtnClick(Sender: TObject);
const
kN = 200;
var
ALFRG : byte;
k : double;
ch : integer;
a, a2 : double;
fkd, b, u : double;
c, L : double;
Ek : double;
i : integer;
x, y, dx : double;
snuk : double;
ty, by : double;
lx, rx : double;
def, ddf : double;
begin
val(Labelededit10.Text, a2, ch);
if ch <> 0 then begin
application.MessageBox('縄跳び紐支持間に間違いがあります。','注意',0);
exit;
end;
val(LabeledEdit11.Text, k, ch);
if ch <> 0 then begin
application.MessageBox('縄跳び紐離心率Kに間違いがあります。','注意',0);
exit;
end;
if k = 0 then begin
application.MessageBox('k(離心率)の値がゼロでは張力計算出来ません。','注意',0);
exit;
end;
if abs(k) > 1 then begin
application.MessageBox('k(離心率)の最大値は±1です。','注意',0);
exit;
end;
memo1.Clear;
ALFRG := 0;
fkd := calc_first_elliptic_integral(k, pi / 2, ALFRG); // 2 * 第一種楕円積分(90°)
if ALFRG = 1 then begin
memo1.Lines.Add('支持間の距離係数 第一種楕円積分の');
memo1.Lines.Add('積分用の値がゼロになります。');
memo1.Lines.Add('Kの値を1以下にして下さい。');
exit;
end;
if radiobutton1.Checked then Chart1.RightAxis.Title.Caption := '垂直応力分布(単位無し)'
else Chart1.RightAxis.Title.Caption := '垂直応力積分値';
// 各種計算
a := a2 / 2;
c := a / fkd; // 積分値に対する補正係数
b := 2 * k / (1 - k * k) * c; // 最大値 中央の位置
Ek := calc_second_elliptic_integral(k, pi / 2); // 第二種楕円積分(90°)
L := 4 * c * Ek / (1 - k * k) - a2; // 弧の長さ計算
memo1.Lines.Add('補正係数 c = ' + floatTostrF(c, ffFixed, 10, 5));
memo1.Lines.Add('紐の中心高さ b = ' + floatTostrF(b, ffFixed, 10, 5));
memo1.Lines.Add('紐の 長さ L = ' + floatTostrF(L, ffFixed, 10, 5));
Series1.Clear;
Series2.Clear;
Series3.Clear;
// グラフスケール設定
if abs(a2) > b then begin
ddf := a2 / 10;
def := (a2 - b) / 2;
ty := b + def + ddf;
by := 0 - def - ddf;
rx := a + ddf;
lx := -a - ddf;
end
else begin
ddf := b / 10;
def := (b - a2) / 2;
ty := b + ddf;
by := 0 - ddf;
rx := a + def + ddf;
lx := -a - def - ddf;
end;
// グラフのスケール設定値セット
Series2.AddXY(lx, ty);
Series2.AddXY(lx, by);
Series2.AddXY(rx, by);
application.ProcessMessages;
// グラフ作図と分割積分
dx := a / KN; // ΔX
// 0~KN 計算作図
for i := 0 to KN do begin
x := i * dx; // x位置
u := x / c; // F(α,k)=u
// jacobi_sn ヤコビの楕円関数
snuk := jacobi_sn(u, k);
y := snuk * b; // x位置のyの値
Series1.AddXY(x - a, y); // グラフに追加
end;
for i := KN + 1 downto 0 do begin
x := i * dx; // x位置
u := x / c; // F(α,k)=u
// jacobi_sn ヤコビの楕円関数
snuk := jacobi_sn(u, k);
x := a2 - x;
y := snuk * b; // x位置のyの値
Series1.AddXY(x - a, y); // グラフに追加
end;
application.ProcessMessages;
// 張力計算
tension(a, k, b, c);
end;
end.
 jacobi_elliptic_skipping_rope.zip
jacobi_elliptic_skipping_rope.zip
各種プログラム計算例に戻る
最初に戻る