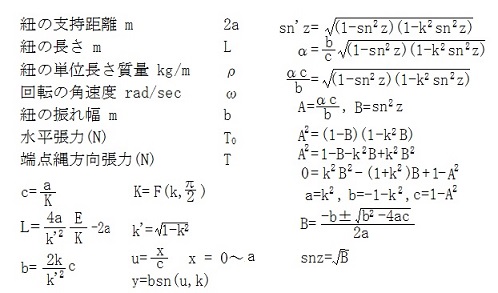
 ヤコビの楕円関数snzを微分sn’zにします。
ヤコビの楕円関数snzを微分sn’zにします。微分した sn’z に b/c を乗じると、snz を計算した x 位置の傾斜 α になります。
A=αc/b, B=sn2z として、二次方程式を解くと sn2z を求める事が出来ます。
snzを求める事が出来たら、sn-z で u の値を計算し、更に u=x/c で値 x を求めます。
sn-zの計算は第一種楕円積分です。
縄跳び紐との接線その2
縄跳び紐の形状に対して、傾きαを指定した接線の計算をします。
ヤコビ関数sn(z)を微分して、傾きαの値から縄跳び紐との接点座標を求めます。
縄跳び紐との接線その1では、縄跳び紐の曲線を分割して、分割ごとに傾きを計算して配列をつくり、その配列から、指定された傾きαとなる座標の近似値を求めていました。
此処では、計算で求めます。
ヤコビの楕円関数snzを微分sn’zにします。
微分した sn’z に b/c を乗じると、snz
を計算した x 位置の傾斜 α になります。
A=αc/b, B=sn2z
として、二次方程式を解くと sn2z
を求める事が出来ます。
snzを求める事が出来たら、sn-z
で u の値を計算し、更に u=x/c で値 x
を求めます。
sn-zの計算は第一種楕円積分です。
縄跳び紐との接線その1と同じ結果となれば、計算は正しい事になります。
プログラム
//----------------------------------------------------- // ヤコビの楕円関数と縄跳びの紐計算 // プログラムは下記の資料によります // http://fuchino.ddo.jp/yatsugatake/ellipticx.pdf // http://www.wannyan.net/scidog/ellipse/ellipse.pdf //----------------------------------------------------- unit Main; interface uses Winapi.Windows, Winapi.Messages, System.SysUtils, System.Variants, System.Classes, Vcl.Graphics, Vcl.Controls, Vcl.Forms, Vcl.Dialogs, Vcl.StdCtrls, Vcl.ExtCtrls, VclTee.TeeGDIPlus, VCLTee.TeEngine, VCLTee.Series, VCLTee.TeeProcs, VCLTee.Chart; type TForm1 = class(TForm) LabeledEdit10: TLabeledEdit; LabeledEdit11: TLabeledEdit; Memo1: TMemo; nawaBtn: TButton; Chart1: TChart; Series1: TLineSeries; Series2: TPointSeries; massEdit: TLabeledEdit; rotational_speed_Edit: TLabeledEdit; LabeledEdit1: TLabeledEdit; CheckBox1: TCheckBox; Label1: TLabel; LabeledEdit2: TLabeledEdit; Series4: TPointSeries; Series5: TLineSeries; CheckBox2: TCheckBox; procedure nawaBtnClick(Sender: TObject); procedure FormCreate(Sender: TObject); procedure CheckBox1Click(Sender: TObject); procedure CheckBox1KeyPress(Sender: TObject; var Key: Char); private { Private 宣言 } function calc_first_elliptic_integral(k, sinQ: double): double; function calc_second_elliptic_integral(k, sinQ: double): double; function jacobi_sn(u, k: double): double; procedure tension(a2, k, b, c: double); function invertK(L, a2: double): double; function second_imperfect_elliptic_integral(Q, K: double; F: integer): double; procedure tangent(a2, k, b, c, alpha, ty: double); function L_jacobi_sn(u, k: double): double; public { Public 宣言 } end; var Form1: TForm1; implementation {$R *.dfm} uses Math; var V : integer; // sn(u, k)計算のLoop数 DBL_EPSILON : double; //------------------------------- // 第1種第2種不完全積分 // FBnKn[0] 第1種不完全積分解 // EBnKn[0] 第2種不完全積分解 // ランデン変換 // Q 角度 rad // K 離心率 // F = 1 第一種積分 F <> 1 第二種積分 //------------------------------- function TForm1.second_imperfect_elliptic_integral(Q, K: double; F: integer): double; var I, MI : integer; Kn : array of double; // Kn knd : array of double; // k'n N2SKn : array of double; // 2/(1+Kn) T2SKnd : array of double; // П2/(1+Kn') BRad : array of double; // β(rad) SinBn : array of double; // sinβn FBnKn : array of double; // F(βn,kn) EBnKn : array of double; // E(βn,kn) LnD : double; begin // K = 0 の時は円なのでpiの角度値rad。 if K = 0 then begin result := Q; exit; end; // この時は1をかえします。 if (F <> 1) and (K >= 1) and (Q >= pi / 2) then begin // F <> 1 は第二種積分 result := 1; exit; end; // 1 >= K > 0 の時 MI := 0; LnD := 0; setlength(kn, MI + 1); // kn kn[0] := K; while LnD <> Kn[MI] do begin // LnDとkn[]が同じ1になるまでくり返します LnD := Kn[MI]; inc(MI); setlength(kn, MI + 1); // kn kn[MI] := 2 * sqrt(Kn[MI - 1])/(1 + Kn[MI - 1]); end; setlength(kn, MI); // kn setlength(knd, MI); // k'n setlength(N2SKn, MI); // 2/(1+Kn) setlength(T2SKnd, MI); // П2/(1+Kn') setlength(BRad, MI); // β(rad) setlength(SinBn, MI); // sinβn setlength(FBnKn, MI); // F(βn,kn) setlength(EBnKn, MI); // E(βn,kn) dec(MI); knd[0] := 1; for I := 1 to MI do knd[I] := (1 - kn[I - 1]) / (1 + Kn[I - 1]); for I := 0 to MI do N2SKn[I] := 2 / (1 + kn[I]); T2SKnd[MI] := N2SKn[MI]; for I := MI - 1 downto 0 do T2SKnd[I] := T2SKnd[I + 1] * N2SKn[I]; BRad[0] := Q; for I := 1 to MI do BRad[I] := (arcsin(kn[I - 1] * sin(Brad[I - 1])) + Brad[I - 1]) / 2; for I := 0 to MI do SinBn[I] := sin(Brad[I]); result := (1 + sin(Brad[MI])) / cos(Brad[MI]); if result <= 0 then exit; // 0以下は自然対数の計算出来ません LnD := Ln(result); if F = 1 then begin // 第一種指定なら result := T2SKnd[0] * LnD; // 第一種 exit; end; for I := 0 to MI do FBnKn[I] := T2SKnd[I] * LnD; EBnKn[MI] := sin(Brad[MI]); for I := MI - 1 downto 0 do EBnKn[I] := (2 * EBnKn[I + 1] + 2 * knd[I + 1] * FBnKn[I + 1]) / (1 + knd[I + 1]) - kn[I] * SinBn[I]; result := EBnKn[0]; // 第二種 end; // 第一種楕円積分 ルーチン // 積分範囲制限なし rad 単位 function TForm1.calc_first_elliptic_integral(k, sinQ: double): double; var J : integer; fqk : double; f1k : double; fek : double; asin : double; begin asin := abs(sinQ); if (k >= 1) and (asin >= 1) then begin // 積分出来ない値だったら if sinQ > 0 then result := MaxDouble // double最大値セット∞の代わり else result := -MaxDouble; // double最小値セット-∞の代わり exit; // 終了 end; f1k := 0; // 完全積分値初期化 J := trunc(asin); // 整数部取り出し if J mod 2 = 0 then asin := asin - J // 小数部処理 象限処理 else asin := 1 - (asin - J); if (J <> 0) and (k < 1) then f1k := second_imperfect_elliptic_integral(pi / 2, K, 1); // 第一種完全積分 fek := second_imperfect_elliptic_integral(arcsin(asin), K, 1); // 第一種不完全積分 if j mod 2 = 0 then fqk := j * f1k + fek // 第1,第3象限の積分値 else fqk := (j + 1) * f1k - fek; // 第2,第4象限の積分値 if sinQ < 0 then fqk := -fqk; // 積分範囲の符号で積分値の符号設定 result := fqk; end; // 第二種楕円積分 ルーチン // 積分範囲 制限なし rad 単位 function TForm1.calc_second_elliptic_integral(k, sinQ: double): double; var f1e : double; eek ,ek : double; j : integer; asin : double; begin asin := abs(sinQ); j := trunc(asin); // 整数部取り出し if j mod 2 = 0 then asin := asin - j // 小数部処理 象限処理 else asin := 1 - (asin - j); if (j <> 0) and (k < 1) then begin f1e := second_imperfect_elliptic_integral(pi / 2, K, 2); // 第二種完全積分 end else f1e := 1; if k < 1 Then ek := second_imperfect_elliptic_integral(arcsin(asin), K, 2) // 第二種不完全積分 else ek := asin; if j mod 2 = 0 then eek := j * f1e + ek // 第1,第3象限の積分値 else eek := (j + 1) * f1e - ek; // 第2,第4象限の積分値 if sinQ < 0 then eek := -eek; // 積分範囲の符号で積分値の符号設定 result := eek; end; // Jacobi関数 Jacobi sn(u, k) function TForm1.Jacobi_sn(u, k: double): double; const KN = 30; var a: array of double; g: array of double; c: array of double; two_n : double; phi : double; half : double; i, j, N : integer; begin half := 1 / 2; if k = 0 then begin result := sin(u); exit; end; if k = 1 then begin result := sin(2 * arctan(exp(u)) - pi / 2); exit; end; N := 1; setlength(a, N); setlength(g, N); setlength(c, N); a[0] := 1; g[0] := sqrt(1 - k * k); c[0] := k; two_n := 1; for i := 0 to KN do begin if abs(a[i] - g[i]) < a[i] * DBL_EPSILON then break; two_n := two_n + two_n; inc(N); setlength(a, N); setlength(g, N); setlength(c, N); a[i + 1] := half * (a[i] + g[i]); g[i + 1] := sqrt(a[i] * g[i]); c[i + 1] := half * (a[i] - g[i]); end; V := i; phi := two_n * a[i] * u; for j := i downto 1 do phi := half * (phi + arcsin(c[j] * sin(phi) / a[j])); result := sin(phi); end; // ヤコビの楕円関数 sn(u, k) 第一種楕円積分の逆変換 function TForm1.L_jacobi_sn(u, k: double): double; const KN = 1000; var sinQ : double; bsinQ : double; ud, dsin : double; i : integer; absu : double; begin absu := abs(u); // uの絶対値 dsin := 0.25; // 初期補正角度設定 sinQ := 0.25; // 初期値設定 for i := 0 to KN do begin ud := calc_first_elliptic_integral(k, sinQ); // 第一種楕円積分 if abs(ud - absu) < max(ud, absu) * DBL_EPSILON then break; // 積分値と指定値の差が誤差設定値より小さくなったら終了 if ud > absu then begin // 積分値が指定値より大きかったら sinQ := sinQ - dsin; // 補正値減算 dsin := dsin / 2; // 補正値2分の1に end; bsinQ := sinQ; sinQ := sinQ + dsin; // 補正値加算 if sinQ = bsinQ then break; // 角度補正値が収束判定値より小さくなったら終了 end; if V < i then V := i; i := trunc(sinQ); if i mod 2 = 0 then // sin(90°)単位をsin(180°)単位に変換 sinQ := (sinQ - i) // 奇数象限と偶数象限計算 else sinQ := 1 - (sinQ - i); i := i div 2; // sin(180°)単位をsin(360°)に変換 if i mod 2 <> 0 then sinQ := -sinQ; // sinは180°毎符号が反転 if u < 0 then sinQ := -sinQ; // 範囲の符号で逆変換値の符号設定 result := sinQ; end; // 傾きαを指定された直線の接点位置の計算 // 微分式 sn'z=√((1-sn^2z)(1-k^2sn^2z)) よりsnz計算 // 曲線の傾斜α=sn'z b/c // a2 縄跳びの支持間距離 // k 離心率 // b 縄跳び紐の高さ // c 曲線係数 // alpha 傾斜 // ty グラフ上限値 procedure TForm1.tangent(a2, k, b, c, alpha, ty: double); var dx, u, snzk : double; a, x, y : double; dy, z : double; A1, B1 : double; a0, b0, c0 : double; begin a := a2 / 2; // 紐中心位置 // 直線の傾αと離心率kから楕円関数snzkの計算 A1 := alpha * c / b; a0 := k * k; b0 := -1 - a0; c0 := 1 - A1 * A1; B1 := (-b0 - sqrt(b0 * b0 - 4 * a0 * c0)) / 2 / a0; snzk := sqrt(B1); // sn(z,k) // 座標計算 u := calc_first_elliptic_integral(k, snzk); // sn- 第一種完全積分 x := u * c; // x座標 x := x - a; // x座標を中心座標に変換 y := snzk * b; // x位置のyの値 if alpha < 0 then x := - x; // 傾きがマイナスの場合はxが逆方向 Series4.AddXY(x, y); // グラフに接点の位置追加 memo1.Lines.Add('接点座標 x = ' + floatTostrF(x, ffFixed, 10, 5)); memo1.Lines.Add('接点座標 y = ' + floatTostrF(y, ffFixed, 10, 5)); // 直線の描画 z := y - alpha * x; // 切片の計算 dx := 0 - a; // 始点x dy := alpha * dx + z; // 始点y if dy > ty then begin // yの値がグラフの上限を超えたら調整 dx := (ty - z) / alpha; dy := ty; end; Series5.AddXY(dx, dy); // グラフに追加 dx := a2 - a; // 終点x dy := alpha * dx + z; // 終点y if dy > ty then begin // yの値がグラフの上限を超えたら調整 dx := (ty - z) / alpha; dy := ty; end; Series5.AddXY(dx, dy); // グラフに追加 end; // 紐の張力、長さ 計算 // a2 縄跳びの支持間距離 // k 離心率 // b 縄跳び紐の高さ // c 曲線係数 procedure TForm1.tension(a2, k, b, c: double); const KN = 1000; var ch : integer; p, w : double; R, T : double; T0, g : double; Ke : double; begin val(massEdit.Text, p, ch); if ch <> 0 then begin application.MessageBox('紐の質量に間違いがあります。','注意', 0); exit; end; if p < 0 then begin application.MessageBox('紐の質量にマイナスはありません。','注意', 0); exit; end; val(rotational_speed_Edit.Text, R, ch); if ch <> 0 then begin application.MessageBox('回転数に間違いがあります。','注意', 0); exit; end; w := R / 60 * pi * 2; // 角速度 ω g := p * w * w; // γ=ρ*ω^2 Ke := calc_first_elliptic_integral(k, 1); // 第一種完全積分 T0 := g * a2 * a2 / 4 / (1 - k * k) / Ke / Ke; memo1.Lines.Add('紐の水平張力(N) To= ' + floatTostrF(T0, ffFixed, 10, 5)); T := T0 * sqrt(b * b / c / c + 1); memo1.Lines.Add('紐の張力(N) T'' = ' + floatTostrF(T, ffFixed, 10, 5)); end; // 離芯率kの計算 // L=4a/k'^2*E/K-2aのaとLが既知なのでkの値を求めます。 // L 紐の長さ // a2 支持間距離 function TForm1.invertK(L, a2: double): double; var c, fc : double; k, E, fk : double; dk : double; N : integer; bk : double; begin a2 := abs(a2); c := (L + a2) / a2 / 2; // L=4a/k'^2*E/K-2a から判定用固定値計算 dk := 1 / 2; // Δk k := dk; // 離心率初期値 N := 0; repeat inc(N); if k >= 1 then k := 1 - DBL_EPSILON; // kが1に成った時1から僅かに小さくします。 E := calc_second_elliptic_integral(k, 1); // 第二種完全積分 fk := calc_first_elliptic_integral(k, 1); // 第一種完全積分 fc := E / fk / (1 - k * k); // 判定比較値計算 if fc > c then begin // 大きかったら k := k - dk; // Δk減算 dk := dk / 2; // Δk 2分の1 end; bk := k; k := k + dk; // k+Δk until (bk = k) or (N > 200); // 収束判定 memo1.Lines.Add('離芯率計算ループ数 N = ' + intTostr(N)); result := k; end; // 縄跳びの縄弛み計算 procedure TForm1.nawaBtnClick(Sender: TObject); const kN = 400; var k : double; ch : integer; a, a2 : double; fkd, b, u : double; c, L : double; i : integer; x, y, dx : double; snuk : double; ty, by : double; lx, rx : double; def, ddf : double; Ek : double; Lk : double; alpha : double; Vm : double; begin V := 0; k := 0; L := 0; val(Labelededit10.Text, a2, ch); if ch <> 0 then begin application.MessageBox('縄跳び紐支持間に間違いがあります。','注意',0); exit; end; val(Labelededit2.Text, alpha, ch); if ch <> 0 then begin application.MessageBox('直線の傾きに間違いがあります。','注意',0); exit; end; if checkbox1.Checked then begin val(LabeledEdit1.Text, k, ch); if ch <> 0 then begin application.MessageBox('縄跳び紐離心率Kに間違いがあります。','注意',0); exit; end; if k >= 1 then begin application.MessageBox('k(離心率)の値を1以下にして下さい。','注意',0); exit; end; if k < 0 then begin application.MessageBox('k(離心率)の値にマイナスはありません。','注意',0); exit; end; end else begin val(LabeledEdit11.Text, L, ch); if ch <> 0 then begin application.MessageBox('縄跳び紐の長さに間違いがあります。','注意',0); exit; end; if L <= abs(a2) then begin application.MessageBox('紐の長さは支持間より長くしてください。','注意',0); exit; end; end; memo1.Clear; if not checkbox1.Checked then begin memo1.Lines.Add('紐の長さ(L=' + floatTostr(L) + ')指定計算'); k := invertK(L, a2); // 離芯率kの計算 memo1.Lines.Add('離芯率 k = ' + floatTostrF(k, ffFixed, 10, 5)); end else memo1.Lines.Add('離心率(k=' + floatTostr(k) + ')指定計算'); fkd := calc_first_elliptic_integral(k, 1); // 第一種完全積分 if abs(k) = 0 then begin application.MessageBox('離心率がゼロです。','注意',0); exit; end; // 各種計算 a := a2 / 2; c := a / fkd; // 積分値に対する曲線係数 b := 2 * k / (1 - k * k) * c; // 最大高さ 中央の位置 // 端点最大傾斜(b / c)に対するαの確認 if abs(alpha) > (b / c) then begin application.MessageBox(pchar('直線の傾斜が大きすぎます。' + #13#10 + '最大値は' + floatTostr(b / c) + ' です。'),'注意',0); exit; end; memo1.Lines.Add('曲線係数 c = ' + floatTostrF(c, ffFixed, 10, 5)); memo1.Lines.Add('紐の中心高さ b = ' + floatTostrF(b, ffFixed, 10, 5)); // 紐の長さ計算 中間位置の計算は出来ません if checkbox1.Checked then begin Ek := calc_second_elliptic_integral(k, 1); // 第二種完円積分 Lk := 4 * c * Ek / (1 - k * k) - a2; // 弧の長さ計算 memo1.Lines.Add('紐の長さ L = ' + floatTostrF(Lk, ffFixed, 10, 5)); end; Series1.Clear; Series2.Clear; Series4.Clear; Series5.Clear; // グラフスケール設定 Vm := b / c; if b > Vm then Vm := b; if abs(a2) > Vm then begin ddf := a2 / 10; def := (a2 - b) / 2; ty := Vm + def + ddf; by := 0 - def - ddf; rx := a + ddf; lx := -a - ddf; end else begin ddf := Vm / 10; def := (Vm - a2) / 2; ty := Vm + ddf; by := 0 - ddf; rx := a + def + ddf; lx := -a - def - ddf; end; // グラフのスケール設定値セット Series2.AddXY(lx, ty); Series2.AddXY(lx, by); Series2.AddXY(rx, by); application.ProcessMessages; // グラフ作図 dx := a2 / KN; // ΔX // 0~KN 計算作図 for i := 0 to KN do begin x := i * dx; // x位置 u := x / c; // F(α,k)=u if CheckBox2.Checked then snuk := L_jacobi_sn(u, k) // ヤコビの楕円関数 第一種楕円積分の逆変換 else snuk := jacobi_sn(u, k); // jacobi_sn ヤコビの楕円関数 y := snuk * b; // x位置のyの値 Series1.AddXY(x - a, y); // グラフに追加 end; application.ProcessMessages; // 張力計算 tension(a2, k, b, c); tangent(a2, k, b, c, alpha, ty); Label1.Caption := 'sn(u) 最大Loop数= ' + intTostr(V); memo1.Lines.Add(''); memo1.Lines.Add('sn’zの式利用による座標計算'); end; procedure TForm1.CheckBox1Click(Sender: TObject); begin if CheckBox1.Checked then begin labeledEdit1.Enabled := True; labeledEdit11.Enabled := False; end else begin labeledEdit1.Enabled := False; labeledEdit11.Enabled := True; end; end; procedure TForm1.CheckBox1KeyPress(Sender: TObject; var Key: Char); begin if CheckBox1.Checked then CheckBox1.Checked := False else CheckBox1.Checked := True; end; procedure TForm1.FormCreate(Sender: TObject); var x, y, z : double; i : integer; begin i := 0; x := 1; y := 1; repeat y := y / 2; z := x + y; inc(i); until (z = x) or (i > 100); DBL_EPSILON := y * 2; labeledEdit1.Enabled := False; end; end.
![]() jacobi_elliptic_differentia_skipping rope_tangent.zip
jacobi_elliptic_differentia_skipping rope_tangent.zip