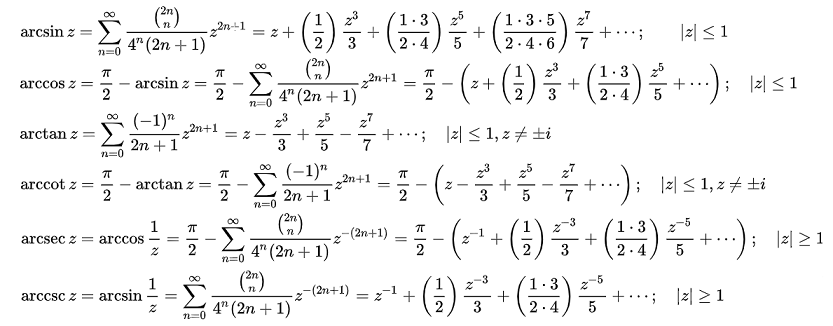
逆三角関数 無限級数計算
逆三角関数の計算を無限級数を用いて計算します。
レオンハルト・オイラーの計算

詳細については
ウィキペディア 逆三角関数 を参照してください。
 プログラムは、arcsinとarctanしか作成していませんが、arccosは
π/2 -arcsin(x)で計算が出来るように、他の逆三角関数も計算が出来ます。
プログラムは、arcsinとarctanしか作成していませんが、arccosは
π/2 -arcsin(x)で計算が出来るように、他の逆三角関数も計算が出来ます。
更に、
ピタゴラスの定理と、三角比の定義を利用すれば、どれか一つの逆三角関数が計算できれば、全て計算が可能となります。
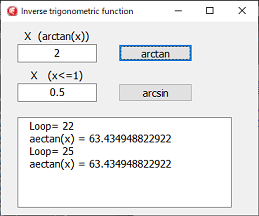
問題は、無限級数なので、arcsin(x)の時、xの値が1に近づくと、計算のループ数が増え計算に時間がかかります。
そこで、45°X=0.7 辺りを境にして、π/2-arccos(X)を計算します。
arcsin(1)の時、π/2-arccos(0)となり無限にループ数が増えるのを防ぐことができ、Doubleの精度で多くても30ループ以下で計算が収束します。
ピタゴラスの定理と、三角比の定義を利用すればarccos(x)
= arcsin(√(1-x2))で計算計算が出来ます。
arccos(x)、arctan(x)や他の逆三角関数も同様な処理をして計算ループ数を少なくすることができます。
通常の無限級数の場合arctan(x)の値が1に近づくと、ループ数が非常にふえます、45°の時が1なので通常の無限級数計算では、ループ数を減らす事はできません。
arctan(x)の計算に
レオンハルト・オイラーの計算があり、xの値が1に近づく、或いは1になっても、ループ数は、左程増えません。また、1を超えても計算が可能ですが、ループ数が増加します、そこで1を超えたら、π/2-arctan(1/X)とすることで、他の計算と同じようにループ数を減らすことが出来ます。
プログラム
unit Main;
interface
uses
Winapi.Windows, Winapi.Messages, System.SysUtils, System.Variants, System.Classes, Vcl.Graphics,
Vcl.Controls, Vcl.Forms, Vcl.Dialogs, Vcl.StdCtrls, Vcl.Buttons, Vcl.ExtCtrls;
type
TForm1 = class(TForm)
LabeledEdit1: TLabeledEdit;
BitBtn1: TBitBtn;
LabeledEdit2: TLabeledEdit;
BitBtn2: TBitBtn;
Memo1: TMemo;
procedure BitBtn1Click(Sender: TObject);
procedure BitBtn2Click(Sender: TObject);
private
{ Private 宣言 }
public
{ Public 宣言 }
end;
var
Form1: TForm1;
implementation
{$R *.dfm}
uses system.Math;
// arctan
// 1 を越えたら反対側の角度を計算
// レオンハルト・オイラーの計算
function arctan_routine(x: double): double;
var
i : integer;
ax, y, ans, bans, f: double;
begin
ax := x;
if x > 1 then ax := 1 / x;
y := (ax * ax)/(1 + ax * ax);
i := 1;
ans := 1;
f := 1;
repeat
bans := ans;
f := f * i * 2 / (i * 2 + 1) * y;
ans := ans + f;
inc(i);
until (bans = ans) or (i > 10000);
ans := ans * y / ax;
if x > 1 then ans := pi / 2 - ans;
result := ans;
form1.Memo1.Lines.Append(' Loop= ' + intTostr(i-1));
end;
// 1 を越えたら反対側の角度を計算
function arctanM_routine(x: double): double;
var
i : integer;
tx, ans, bans, f: double;
begin
tx := x;
if x > 1 then tx := 1 / x;
ans := tx;
f := tx;
i := 1;
repeat
bans := ans;
f := - f * tx * tx;
ans := ans + f / (i * 2 + 1);
inc(i);
until (bans = ans) or (i > 10000000);
if x > 1 then ans := pi / 2 - ans;
result := ans;
form1.Memo1.Lines.Append(' Loop= ' + intTostr(i-1));
end;
// arcsin
// xの値が0.999999位が限度
function arcsin_routine(x: double): double;
label
EXT;
var
i : integer;
ans, bans, f, d: double;
begin
i := 1;
if x = 1 then begin
result := pi / 2;
goto EXT;
end;
f := 1 / 2;
d := x * x * x;
ans := (x + f * d / 3);
repeat
bans := ans;
d := d * x * x;
f := f * (i * 2 + 1) / ((i + 1) * 2);
ans := ans + f * d / (i * 2 + 3);
inc(i);
until (bans = ans) or (i > 10000000);
result := ans;
EXT:
form1.Memo1.Lines.Append(' Loop= ' + intTostr(i - 1));
end;
// 0.7を超えたら反対側の角度を求めます(cos計算になります)
function arcsinM_routine(x: double): double;
label
EXT;
var
i : integer;
ax, ans, bans, f, d: double;
begin
i := 1;
// if x = 1 then begin
// result := pi / 2;
// goto EXT;
// end;
ax := x;
if x > 0.7 then ax := sqrt(1 - x * x);
f := 1 / 2;
d := ax * ax * ax;
ans := (ax + f * d / 3);
repeat
bans := ans;
d := d * ax * ax;
f := f * (i * 2 + 1) / ((i + 1) * 2);
ans := ans + f * d / (i * 2 + 3);
inc(i);
until (bans = ans) or (i > 1000);
if x > 0.7 then ans := pi / 2 - ans;
result := ans;
EXT:
form1.Memo1.Lines.Append(' Loop= ' + intTostr(i - 1));
end;
// arctan 計算
procedure TForm1.BitBtn1Click(Sender: TObject);
var
ch : integer;
x, ax, at, deg : double;
begin
val(Labelededit1.Text, x, ch);
if ch <> 0 then begin
application.MessageBox('入力値に間違い化があります。','注意',0);
exit;
end;
Memo1.Clear;
ax := abs(x);
at := arctan_routine(ax);
if x < 0 then at := -at;
deg := at / pi * 180;
Memo1.Lines.Append(' aectan(x) = ' + floatTostr(deg));
at := arctanM_routine(ax);
if x < 0 then at := -at;
deg := at / pi * 180;
Memo1.Lines.Append(' aectan(x) = ' + floatTostr(deg));
end;
// arcsin 計算
procedure TForm1.BitBtn2Click(Sender: TObject);
var
ch : integer;
x, ax, asi, deg : double;
begin
val(Labelededit2.Text, x, ch);
if ch <> 0 then begin
application.MessageBox('入力値に間違いがあります。','注意',0);
exit;
end;
if abs(x) > 1 then begin
application.MessageBox('入力値が大きすぎます。(X ≧ 1)','注意',0);
exit;
end;
Memo1.Clear;
ax := abs(x);
asi := arcsin_routine(ax);
if x < 0 then asi := -asi;
deg := asi / pi * 180;
Memo1.Lines.Append(' aecsin(x) = ' + floatTostr(deg));
asi := arcsinM_routine(ax);
if x < 0 then asi := -asi;
deg := asi / pi * 180;
Memo1.Lines.Append(' aecsin(x) = ' + floatTostr(deg));
end;
end.
![]() InverseA_trigonometric_function.zip
InverseA_trigonometric_function.zip
三角関数、逆三角関数、その他関数 に戻る